
本人从事运动控制有几年了,在最近几年里接触了不少做机器人的大牛,了解了自以为很多的行业应用知识及方案,今天就在这发表自己一下自己的拙见,还望各位大佬批评指正。
接触这个行业属高校、研究所居多,企业也有。高校研究所大部分是研究为主,作为技术储备;但是企业更倾向于商业化产品,成本控制比较严格,但是目前看来暂时还没成批量的产品。

将电机、驱动器、编码器高度集成,相比较同类型产品采用普通伺服外搭减速结构的方式,其结构尺寸大大简化,可以做到更实用的扁平化结构,在设计上有更大的实用性及灵活空间。
该产品采用了内嵌式行星减速器,在保证结构精简的同时,兼顾了提升扭矩密度大力矩输出的需求,在多足机器人方面有极其优异的应用性能。
四足机器人上的研发生产,目前国内外已经有类似成熟的技术方案,在专注于消费级、行业级市场上有极其广泛的应用场景,不仅仅是在比赛和巡检方面,服务级机器人市场上也是受众面很广的。
下面我就来说说我了解的一些硬件配置,可能我见识不多,说的不对的希望各位批评指正,谢谢!
一、电机
目前用的比较多的有两种:一是内转子力矩电机,比如MIT第一代猎豹,第二代猎豹,SpotMini等体型稍微大点的狗;而是外转子电机,比如MIT最新的小猎豹等。
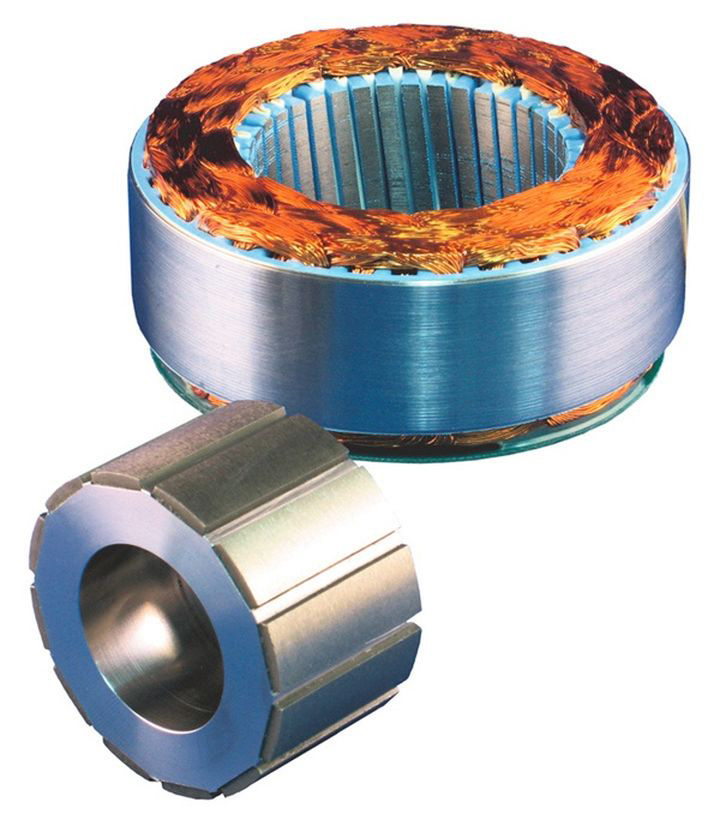
1.内转子力矩电机
MIT最初的猎豹就是用的Alliedmotion HT05001型号的力矩电机,现在国内也是用这个品牌的电机比较多,HT系列、MF系列都有在用,此电机的优点在于功率密度好、齿槽效应小、峰值力矩大,选他的主要原因还是峰值力矩大,有的型号能达到堵转力矩的10倍左右,机器人行业大部分都是用的电机峰值性能,峰值性能好,响应才能跟的上。但是这种电机成本会比较高,毕竟机器人行业就是烧钱行业。
 MF系列
MF系列
 HT系列
HT系列
2.外转子电机
最近曝光的MIT小猎豹,就是用的外转子电机加减速齿轮做的,相对于内转子,外转子价格会便宜很多,这样使用者可以肆无忌惮的break it;但是外转子齿槽力矩大的缺点也很明显,这样对做控制的同学要求比较高,这种电机比较适合做体型比较小的狗。

集成化的外转子电机,对于动手能力不强,项目周期短的同学比较合适
二、减速机
适用于四足机器人的减速机还没有成熟化的标准产品,都是自己动手去做或者找人设计,因为四足用减速机大部分会要求在10比以下,又要轻又要薄,目前市售10比以下减速机是行星减速机,又重又长,不适合此场景的应用,所以需要去进行专门的定制或者自己动手DIY。
 10比以下的减速齿轮
10比以下的减速齿轮

20比以下的减速齿轮
三、驱动器
驱动器用的就五花八门了,对于电流比较的电机,有自己动手能力的就可以自己做驱动板;除此之外市面也有售成熟的驱动器,像大家熟知的ELMO、Copley、赛普肯等。后两家已经针对机器人行业出了圆形驱动器,但是在大电流领域还是ELMO一家独大。

ELMO 10KW的驱动器,160A/80V,140A/100V可选
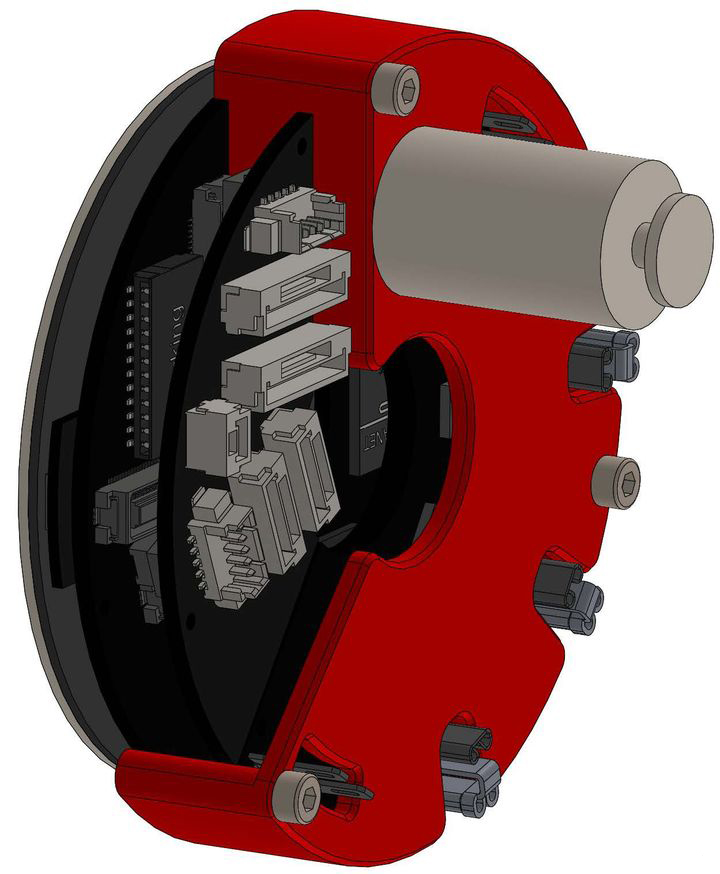
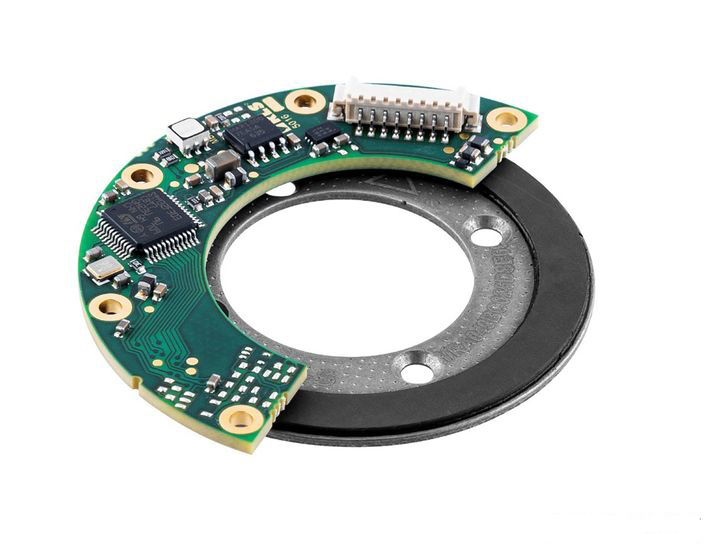
集抱闸、编码器、驱动器一身

纯圆形驱动器
四、编码器
编码器的可选性比较多,但是比较公认是RLS的磁编码器,磁编码器稳定性好,适应能力强,抗震动比较好,所以很多人会首选磁编码器,当然也有选普通光电编码器,价格便宜。
以上就是本人近几年在传动控制上的一些经历及见解,对四足机器人行业的也有些短视浅见,在每次的经历中也总结出许多经验,如果有对此行业感兴趣的,欢迎骚扰:13701956498 吕先生,我们可以提供全套的解决方案,多谢!